Research FieldsResearch
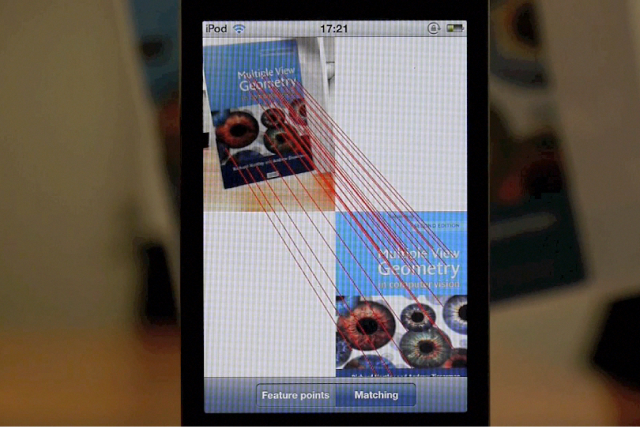
Image RecognitionComputer Vision

We are currently working in pursuit of confidence and safety in
driving assistance and autonomous cars through the development of
artificial intelligence for automobiles.
Advanced image
recognition technology is essential in order that automobiles are able
to recognize their surroundings, as well as the circumstances of
drivers and passengers.
To that end, DENSO IT Laboratory has
pursued research in areas such as machine learning and 3D
environmental recognition, in order to develop the cutting edge
technologies that will lead to future products.
DENSO IT
Laboratory were also among the first to begin research into deep
learning, giving presentations on the efficient learning of mass data
sets (distributed learning algorithms), the development of compact,
high precision models (model compression) for embedded devices, and
other technologies that will be key to practical applications in
automotive fields. Denso IT Laboratory will continue to produce the
world’s top technologies through products and cooperation with
academic institutions both within Japan and overseas.
In
addition, our image recognition technologies have been adopted in
fields other than the automotive industry. As examples, these are now
in use with industrial robots (high speed, high precision parts
placement) and image search services. These are also used in
competitive Shogi matches for the placement of pieces by the
shogi-playing robot “Den'oute-san” developed by DENSO Wave, a robot
that competes with professional Shogi players.
Researcher Interview
-
 Ikuro Sato
Research and Development Group, Senior Researcher
Job changes between different industries
Ikuro Sato
Research and Development Group, Senior Researcher
Job changes between different industries
-
 Kohta Ishikawa
Research and Development Group Researcher
Job changes between different industries
Kohta Ishikawa
Research and Development Group Researcher
Job changes between different industries
-
 Mitsuru Ambai
Research and Development Group Senior Researcher
As researchers
Mitsuru Ambai
Research and Development Group Senior Researcher
As researchers
-
 Shinichi Sumiyoshi
Research and Development Group Researcher
Work-life balance
Shinichi Sumiyoshi
Research and Development Group Researcher
Work-life balance
-
 Yuichi Yoshida
Research & Development Group, Multi Researcher
Multi-talented
Yuichi Yoshida
Research & Development Group, Multi Researcher
Multi-talented
HMI/NLPHuman Machine Interface/Natural Language Processing
Just as you may be reading this interview from a smart phone or tablet, it has become common for us to access content with information devices. We call the technology that connects humans and machines 'UI (User Interface)' or 'HMI (Human-Machine Interface)'. These interfaces specify the way people operate machinery or transmit information to others with it.
In the automotive world, we have regarded steering wheels, accelerators, brakes, and various meters as the HMI for driving. Recently, however, as autonomous cars have been growing more feasible, vehicles often drive themselves in part without manual operation. According to the levels of autonomous driving, the behavior required of drivers will likely change in the future.
We value safety as well as usability for automobiles. To achieve this safety, we have to enable car systems to estimate the conditions of drivers and to anticipate the driver's intentions through its actions. In addition, as a transportation service, we can also imagine an in-car environment as it provides the driver and the passengers new experiences beyond just movement from place to place. HMI for automobiles is an extremely fascinating research field, where we rethink many aspects of human beings and have a lot of fun.


Signal Processing
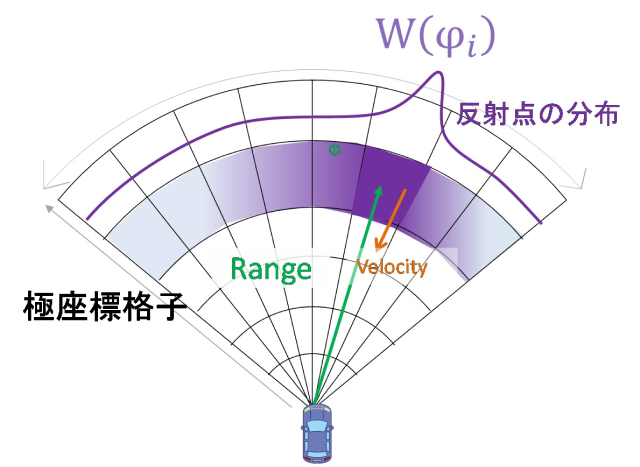
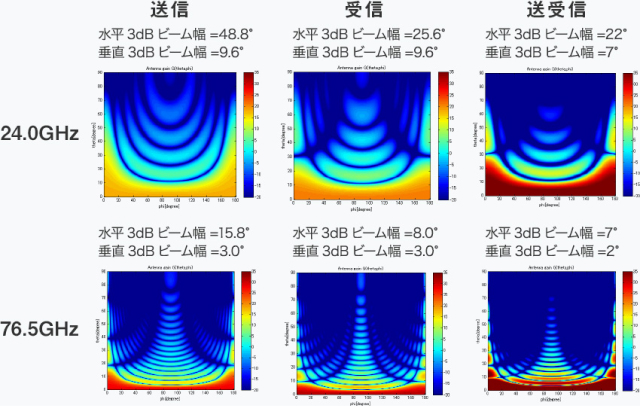
For example, when conducting autonomous driving or driving assistance, the automobile must understand the circumstances of its environment and determine motion control by extracting necessary information from the observed signals sent by cameras, radar, and onboard sensors such as Lidar (Light Detection and Ranging).
How should manufacturing proceed, assuming that processing of such large amounts of information will be carried out by onboard calculation equipment? Or if we look even deeper at the problem, what thought process should be designed to enable the processing of this information by digital processors such as microcomputers, or the SIMD (Single Instruction Multiple Data) processors in which we have recently seen such dramatic advances? What sort of framework is optimum for efficient handling of information using multiple sensors? In the future, how do we formulate problems to enable extraction of universal information out of the big data accumulated from a wide variety of observed signals sent by multiple onboard devices? There are just some of the things that we “need to know”.
Lastly, DENSO operates not only in the automotive field, but also in other industries such as healthcare and security. In each of these sectors, information processing is vitally important and there are once again many things that we will “need to know”. We have conducted research into digital signals in order that we can understand those things that will “need to be known in the manufacturing sites of tomorrow”.

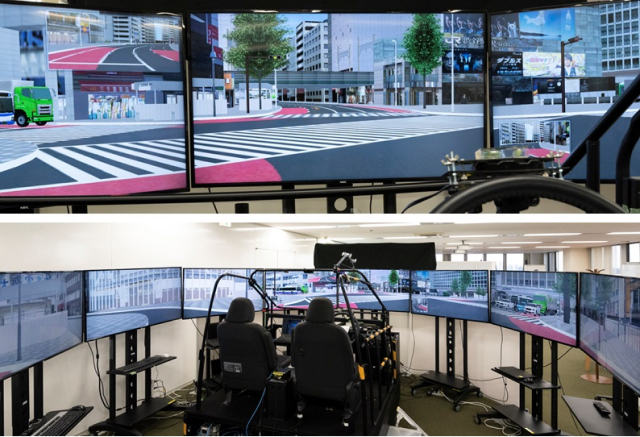
Control / New Territory
Detection of other cars, people, and obstacles by sensors such as radars and cameras is necessary for autonomous cars.
However, detection alone is not enough for autonomous cars.
It is also essential to plan out how the car will move.
To ensure that the autonomous car moves safely and smoothly, we are developing methods for motion planning.
There are two major issues in motion planning.
With only general planning, such as the “left turn” and “right turn” commands found in car navigation systems, the timing and change of angle with which the steering wheel should move are unknown, and it is thus not possible to smoothly turn a car that weighs as much as one ton.
Such is the challenge confronting vehicle dynamics.
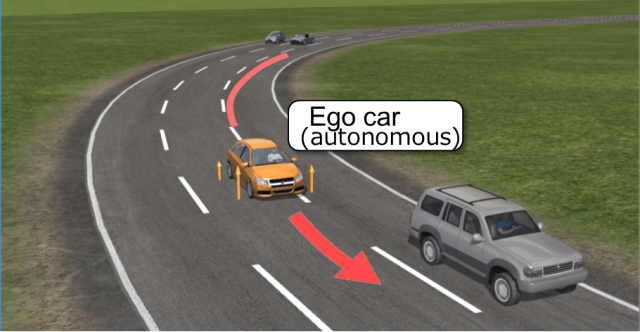
In addition, other cars on the road must also be taken into account.
For example, even if you know the current position of the other cars, without knowing where they will be in the future, it is not possible to plan where your own car should move.
Avoiding collisions and reducing wasteful lane changes are necessary and require prediction of the behavior of other cars.
Longer-term future prediction is even more useful.
In particular, even predicting five seconds ahead is far more useful than one second ahead.
This is the challenge related to prediction of other cars' behavior in the future.
In order to tackle these issues, we have developed planning methods that utilize control engineering to ensure safe, smooth steering and changes in speed based on the equations of vehicle dynamics.