画像認識Computer Vision

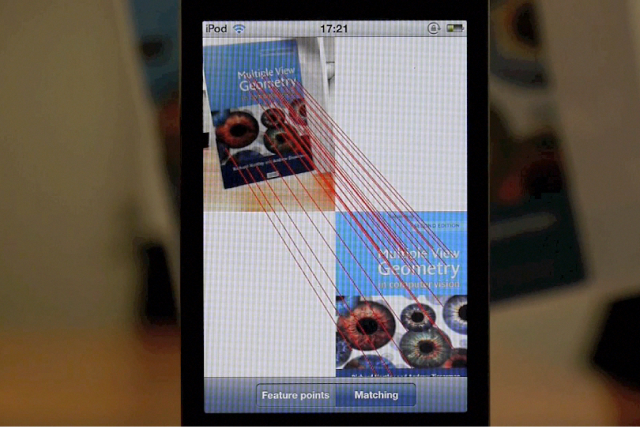
私たちは、車の知能化による、安心・安全な運転支援や自動運転の実現を目指しています。
これには、車自体が自らの周囲の状況を認識したり、ドライバや乗員の様子を把握するための、高度な画像認識技術が欠かせません。
そのため、当社では、機械学習や3次元環境認識などの研究を推し進め、将来の製品に向けた最先端技術の開発に取り組んでいます。
ディープラーニングの研究にもいち早く取り組み、自動車分野で実用化するための鍵となる、大規模データセットを効率よく学習する技術(分散学習アルゴリズム)や、組込みデバイス向けにコンパクトで高精度なモデルを作る技術(モデル圧縮)を発表してきました。これからも、製品や国内外の学会を通じて、世界トップの技術を発信していきます。
また、開発した画像認識技術は車以外の分野にも応用されています。例えば、産業用ロボット(高速かつ高精度な部品の位置決め)や画像検索サービスに私たちの画像認識技術が使われています。将棋のプロ棋士とコンピュータソフトの対決でもおなじみで、デンソーウエーブが開発した将棋を指すロボット「電王手さん」の駒の位置決めにも、私たちの技術が活かされています。




HMI/言語処理Human Machine Interface
人が機械を操作したり、機械から人に情報を伝えるやり方を決めている、人と機械(モノ)の境界を、UI(ユーザインタフェース)やHMI(ヒューマンマシンインタフェース)と言います。
自動車の世界では、運転のためのHMIは、長らくハンドル、アクセル、ブレーキやメーターなどでしたが、近年では自動運転の実用化が進んできており、自動車が部分的に人の運転を肩代わりする場面も増えてきました。自動車では、使いやすさだけではなく、安全性が重要になりますし、そのためには今後はドライバの状態を推定したり、ドライバの意図をくみとって先回りして行動することも必要となります。また自動車を移動サービスという観点で見ると、同乗者も含めて単なる移動だけではない新しい体験を提供できる空間と考えることもできます。自動車のHMIは人を知り、ワクワクさせる、非常に面白い研究領域です。
また言語処理は、私たちの言葉を分析する技術です。デンソーグループは全世界に200余りの拠点があり、長年脈々と蓄積されてきた膨大な言語データを保有しています。今はこれらを活用してグローバルな業務効率化や新価値創造に取り組んでいます。


信号処理Signal Processing
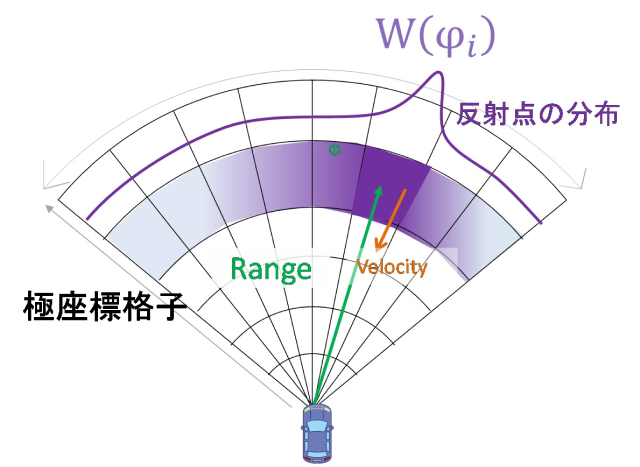
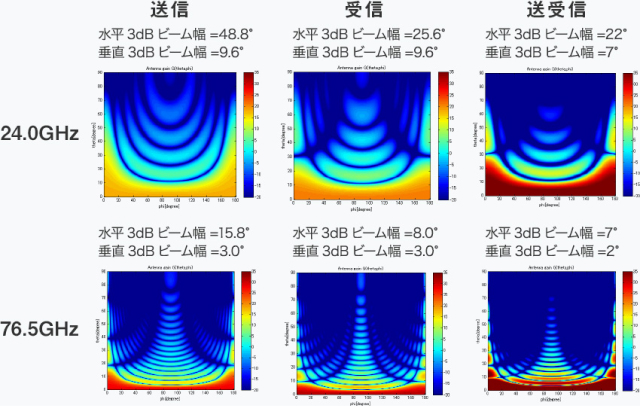
例えば、自動運転や運転支援を行うのであれば、カメラ、レーダー、Lidar(Light Detection and
Ranging)など車載センサからの観測信号から必要な情報を抽出し、周囲状況を理解判断し、車の運動制御する必要があります。
このような大規模な情報処理を車載される演算デバイスなどで行うことを想定したモノづくりはどうあるべきでしょうか?もう少し問題を掘り下げると、これらの処理をマイコンなどのデジタルプロセッサ、さらに近年驚異的に発展してきたSIMD(Single
Instruction Multiple
Data)プロセッサで行うために、どのような考え方で処理をデザインすべきなのか?複数のセンサの情報を効率的に扱うために、どのような枠組みが最適なのか?将来、様々な車種に搭載された様々な観測信号を集積したビッグデータから普遍的な情報を抽出するためには、問題定式化をどのようにすべきか?などなど、多くの“知りたいこと”が生じてきます。
また、デンソーでは自動車分野以外にもヘルスケア、セキュリティなどの事業分野があり、いずれの分野でも信号処理がますます重要となり、ここでも多くの“知りたいこと”が生じます。我々は「ものづくりの現場で将来“知りたいこと”」を見据え、デジタル信号研究を行っています。
研究者インタビュー

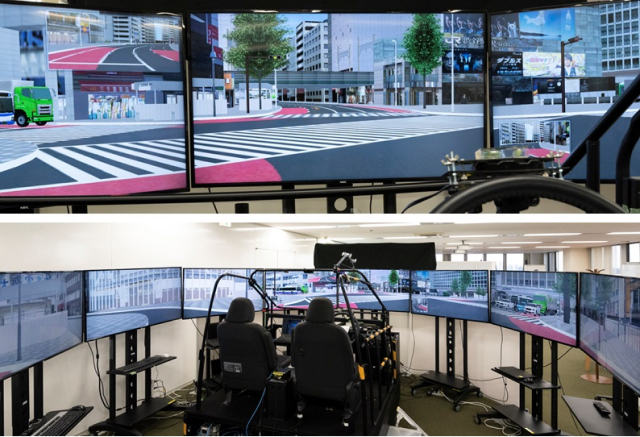
制御/新領域Control / New area
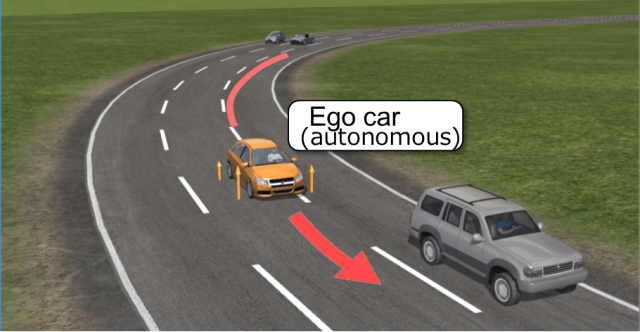
自動運転ではカメラ、レーダ等による他車両の検知、人、障害物の認識がまず必要となりますが、そのあとにクルマをどう走らせるかをプランニングすることが必須となり、これができないと自動運転は実現できません。私たちは自動運転車両を安全かつ滑らかに走らせるためのモーションプランニング手法を開発しています。モーションプランニングには大きく2つの課題があります。
カーナビのような「左折」「右折」といった大雑把なプランでは、ハンドルをどのタイミングでどれぐらい切るかがわからないため、1tもある走行している自動車を無理なく滑らかに曲がらせることができません。これは車両ダイナミクスの課題です。
また、道路上には多数の他車両が走行しています。例え、他車両の現在位置がわかっても、将来の位置がわからなければ自車両をどこに動かせば良いかがわかりません。1秒より3秒、3秒よりは5秒先までの他車両の挙動を理解して、衝突無く、無駄な車線変更動作を減らし安全に走行させる必要があります。これは他車両挙動予測の課題です。
この2つの課題に対して、車両の運動方程式を手掛かりに制御工学を活用して、安全かつ滑らかな操舵や加減速動作をプランニングする手法を開発しています。